
Premiers pas avec Unity3D : Navigation (I)
|
Premiers pas avec Unity3D : Navigation (I) |
|
| Open a door. | < |
 |
> |
L'interface de Unity. |
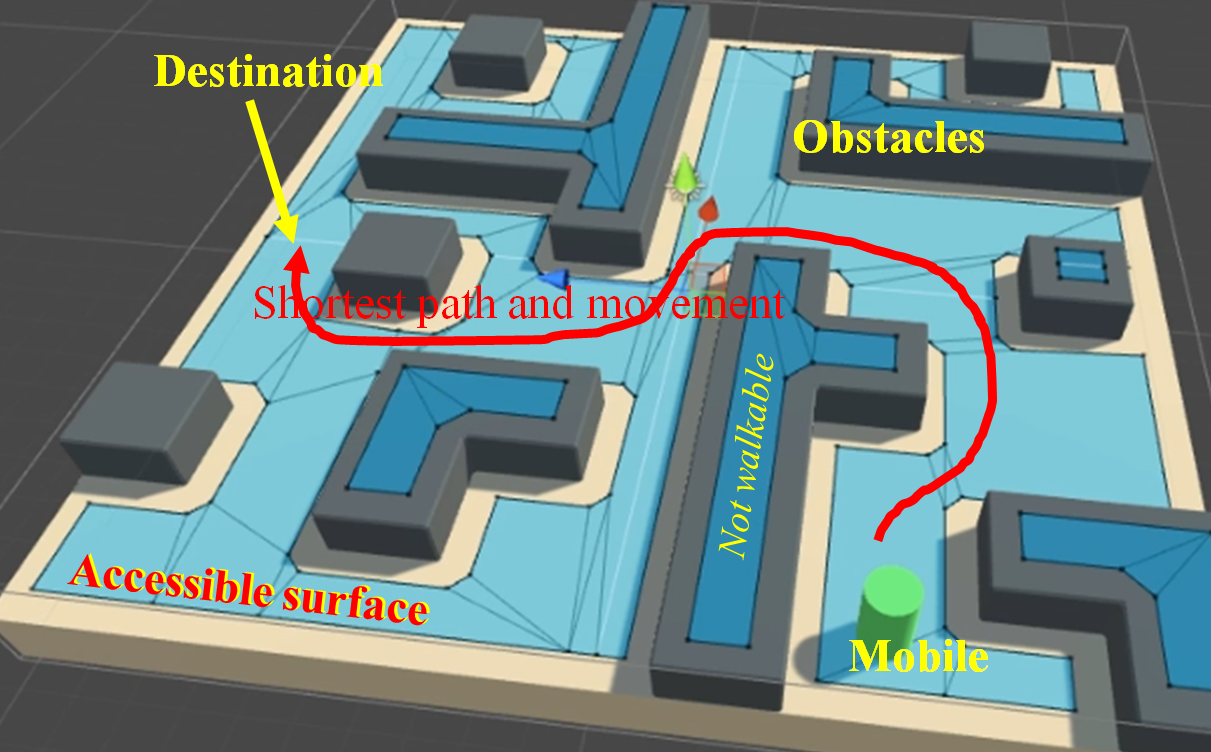
PrincipeLe problème posé est le suivant :Déplacer un mobile automatiquement d'un point de départ quelconque à un point de Destination tout en évitant les obstacles et en choississant le chemin le plus court. La résolution de problème ne nécessite pas d'IA (Intelligence Artificielle) mais relève de l'Algorithmique Géométrique (Computational Geometry). Il est traité en 3 étapes :
|  |
Les obstacles et la surface de déplacementDans la scene, nous allons définir une hierarchie "terrain" composée d'un plan et d'obstacles auquel nous allons associer un espace de navigation : le "NavMesh".Construisez un Empty GameObject nommé "terrain" qui contient la surface de déplacement "Plane" et des obstacles que l'on a appelé "wall_x". Ajoutez un MeshRenderer au "terrain" car le composant est nécessaire pour le calcul de l'espace accessible. Activez la fenêtre Navigation (à droite sur la figure ci-contre) à l'aide du menu : Windows / Navigation Sélectionnez le Mesh Renderer de "terrain" (dont fils sont automatiquement selectionnés) puis activez la Navigation Static et fixez la Navigation Area à Walkable. | 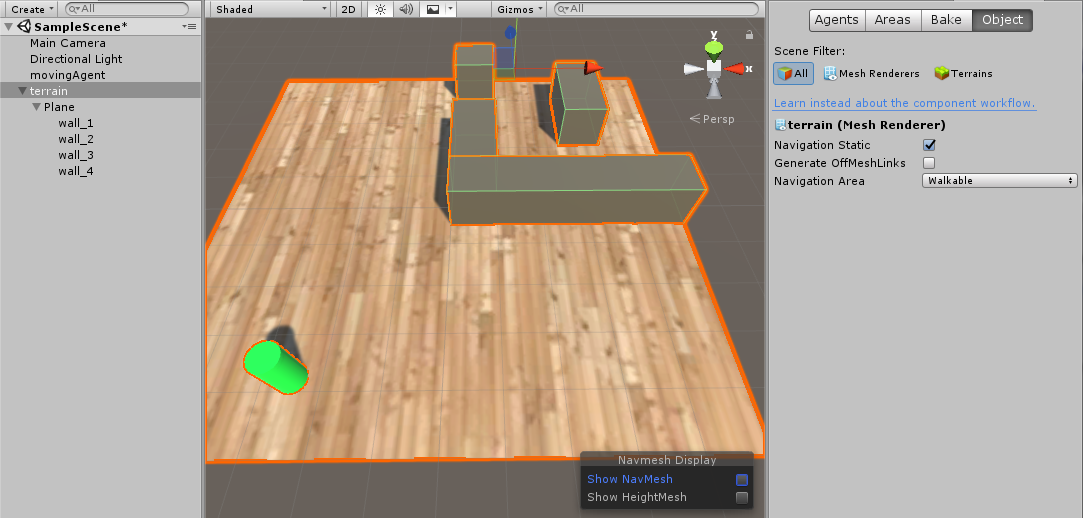 |
Espace accessibleNous allons calculer l'espace accessible (par un agent) sur le "terrain".Pour définir les caractéristiques de l'agent (son encombrement entre autre) passer sur de l'onglet Object à l'onglet Bake (en haut à droite). Et pour lancer le calcul cliquez en bas à droite sur la touche Bake. Une zone s'affiche en bleu : c'est le polygone correspondant à la surface accessible par un agent dont les caractériques par défaut sont : Agent Radius =0.5 Agent Height = 2 Max Slope = 45° Step Height = 0.4 Modifiez les valeurs de ces paramètres (entre autre le Radius) et observez l'évolution de la zone bleue. Notez que le "movingAgent" n'est pas un obstacle (ce n'est pas un élément de terrain). | 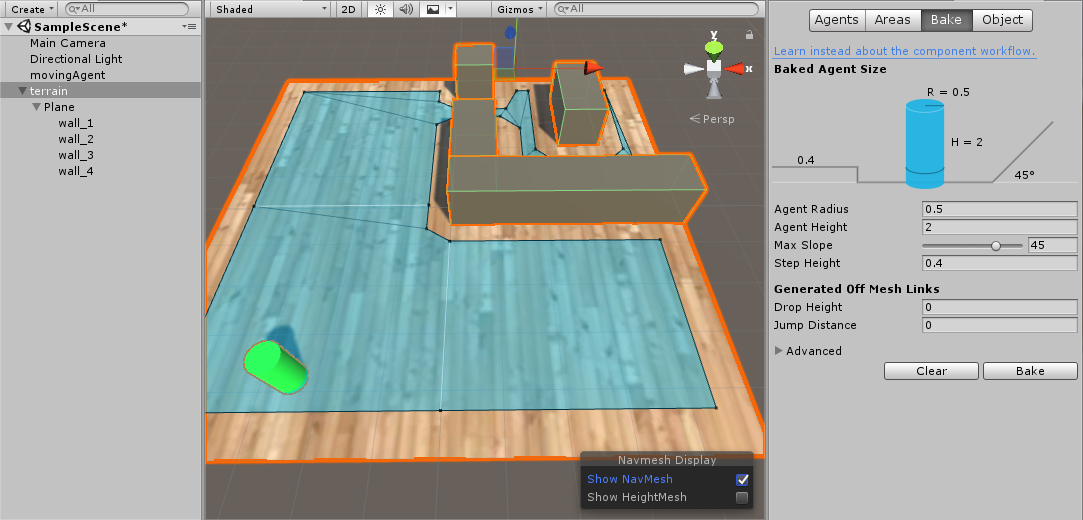 |
Déplacement de l'agentL'agent se déplace par le plus court chemin à une certaine vitesse jusqu'à une destination à définir. Il reste sur l'espace accessible (en bleu). Il faut lui donner une destination (à l'aide d'un script en C# par exemple) et des caractéristiques de déplacement : vitesse, accélération... C'est le role du composant NavMesh Agent.Ajoutez un composant NavMesh Agent au "movingAgent". Avant de tester il faut définir la destination. Pour ce faire nous utiliserons le script C# "MoveToTarget.cs" que nous ajouterons aux composants de l'agent (ressources_TP2.zip). Analysez le script et devinez son résultat. Passez en mode Game et tester l'ensemble. Modifiez les valeurs des paramètres du NavMesh Agent pour obtenir une dynamique acceptable. | 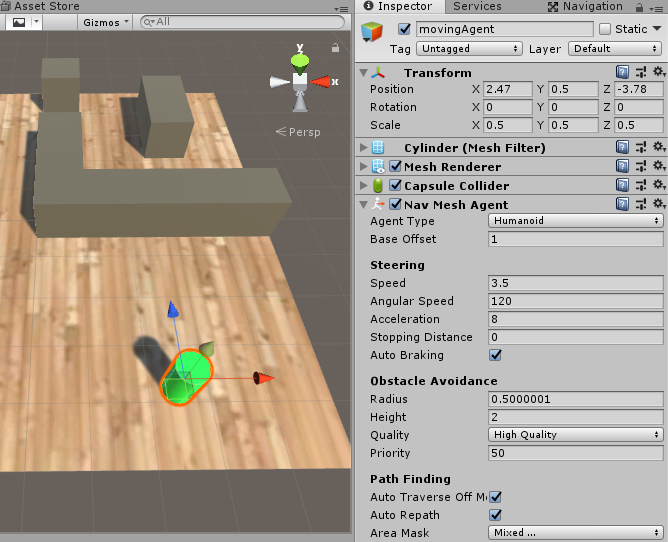 |
Plusieurs agents en mouvementMultiplier le nombre d'agents permet d'avoir des dynamiques intéressantes et de comprendre certains paramètres de navigation. Dupliquez 2 fois simplement le "moving Agent" et réglez la Stopping Distance des NavMeshAgent. Changez les vitesses de déplacement des agents, un plus rapide, un plus lent... Passez en mode Game et tester l'ensemble. Réflexion et prospection Changez les rayons des agents dans l'Inspector (Composant : Transform / Scale). Discutez du résultat (en mode Game) | 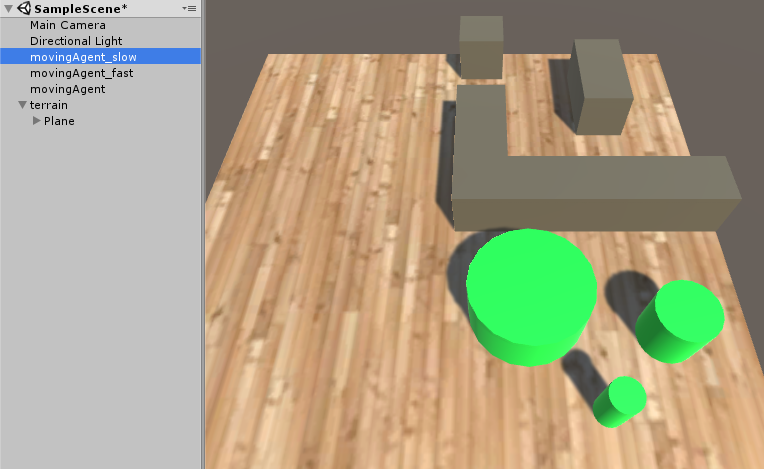 |
Ajouter des portesL'ajout de porte -si elles peuvent s'ouvrir- ne change pas l'espace de navigation mais ajoute de la dynamique au jeu...Reprennez les portes du TP 1 (part II) et placez les dans le labyrinthe. Elles doivent être dans un niveau différent (ou hors de la hierarchie "terrain") pour ne pas être considérées comme des obstacles. Certaines portes peuvent être verrouilées... | part II |
Modifiez la destinationLes agents doivent atteindre une destination fixée en début de partie : le drapeau. Dupliquez et adaptez le script C# : MoveToTarget.cs Multipliez les drapeaux et modifiez les règles : chaque agent doit atteindre le drapeau qui est la plus proche de lui. | part II |
Un début de jeuLes agents collectent des trésors ; doivent atteindre des destinations fixées par la position des trésors. Une fois collecté le trésors disparait et l'agent se dirige sur un autre trésors. Un agent représente le joueur (en rouge) il suit la souris et doit collecter les trésors AVANT les agents (en vert). Il posède une clef qui permet de vérouiller les portes. D'autres agents essayent d'atteindre le joueur pour le tuer. | part II |