
|
T.P. "ALGORITHMES GENETIQUES"
|
|
Principe du TP
Préalables
Pour
ce TP, bootez de préférence sous Linux (en
théorie, tout peut s'effectuer indifféremment sous Linux
ou Windows, mais l'exercice 3 nécessitant de lancer java depuis
un terminal, Linux sera probablement plus commode que Windows...).
- Créez dans votre "homedir" (sous /export/home/manitou/....) un répertoire pour ce TP, nommé par exemple TP-genAlgo ("mkdir TP-genAlgo"), puis placez-vous dedans ("cd TP-genAlgo") ;
- Téléchargez le fichier tp-algoGen.zip dans votre répertoire TP-genAlgo situé sous votre
homedir ;
- Décompressez le fichier en question ("unzip tp-algoGen.zip") :
vous devriez obtenir (dans le répertoire où vous avez
décompressé) 4 fichiers jar "auto-exécutables",
et plusieurs fichiers de données.
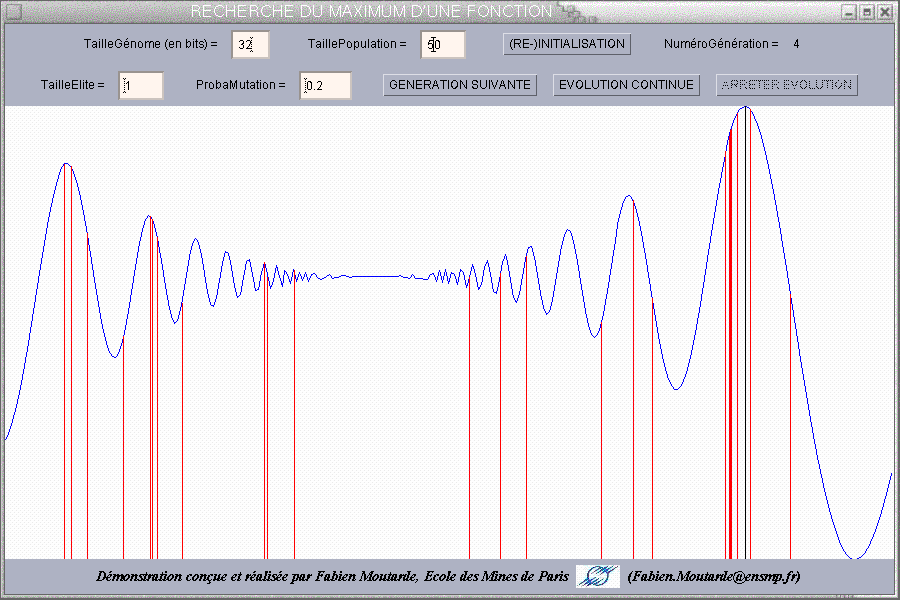
Exercice 1 : recherche du maximum d'une fonction à une variable
Pour démarrer, exécutez le fichier demo-GA-maxFonc.jar (double-cliquez dessus, ou bien faire java -jar demo-GA-maxFonc.jar dans un "terminal").
NOTE : si le double-clic sur le fichier jar ne fonctionne pas, il suffit, dans l'explorateur de fichier, de faire clic-droit
à la souris sur un fichier .jar, d'aller dans l'onglet "Ouvrir
avec", puis d'appuyer sur le bouton "Ajouter", et enfin de mettre
à l'endroit prévu la commande "java -jar %s" (ceci définira pour la suite l'action que l'ordinateur effectuera quand on double-clique sur un fichier de type .jar).
Dans ce problème, une fonction présentant plusieurs maxima
locaux (ce qui rend inapplicables les algorithmes les plus simples de recherche
de maximum) est définie sur un certain intervalle et le but est
de déterminer à l'aide des algorithmes génétiques
l'abscisse du maximum global (sur l'intervalle) de la fonction. On va donc
utiliser une population dans laquelle chaque individu correspond à
une abscisse située dans l'intervalle (et sera représenté
par un trait vertical allant du bas de la fenêtre jusqu'à
la valeur de la fonction en ce point).
-
Une des premières questions qui se posent est celle du codage :
à quelle séquence de gènes faire correspondre une
abscisse de l'intervalle ? On a fait le choix de prendre chaque gène
égal à un bit, et de faire correspondre à chaque génome
(du type 10011100...) l'abscisse x = xMin + N*(xMax-xMin)/Nmax où N est l'entier dont la représentation
binaire est donnée par le génome, et Nmax est le plus grand
entier repésentable avec le nombre de bits correspondant à
taille du génome. Il ne reste donc plus qu'à choisir le nombre
de bits constituant le génome de chaque individu.
Testez diverses valeurs pour cette taille de génome et
générez pour chacune plusieurs populations initiales aléatoires
en cliquant sur le bouton "(RE-)INITIALISATION", et constatez qu'il faut
qu'elle soit suffisamment grande (typiquement >=10) pour qu'assez de valeurs
d'abscisse soient atteignables.
- Testez ensuite l'impact du nombre d'individus de la population
: si celui-ci est trop petit, il faut beaucoup plus de générations
pour atteindre le maximum, car il n'y a pas assez de variété
dans la population initiale, et seules les mutations finissent par permettre
à l'algorithme de converger.
- Testez enfin l'influence de la probabilité de mutation
: si elle est trop faible, l'algorithme est susceptible de se bloquer dans
un maximum local au lieu de converger vers le maximum global.
Remarque : cette démonstration a
un but uniquement pédagogique et illustratif, puisque vous constaterez
que le nombre total d'abscisses testées avant d'atteindre le maximum global (égal au nombre de
générations multiplié par la taille de la population) est généralement tel qu'on aurait
un aussi bon résultat en répartissant simplement ce nombre
d'abscisses uniformément sur l'intervalle puis en cherchant Max(f(Xi)).
L'intérêt
des algorithmes génétiques pour la recherche de maximum de
fonction n'est en pratique réel que dans le cas d'une fonction à
beaucoup de variables, car alors toute exploration systématique
de l'espace des n-uplets possibles devient prohibitive, tandis qu'un algorithme
génétique peut rester efficace. Malheureusement, la visualisation
de la recherche du maximum d'une fonction à n variables est problématique
pour n=2, et devient carrément impossible (ou en tout cas incompréhensible)
pour n>=3...
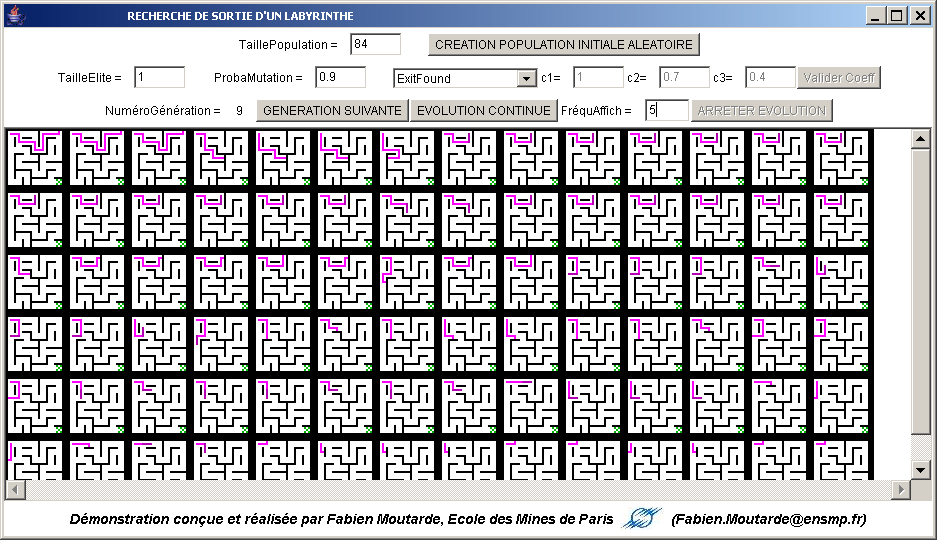
Exercice 2 : recherche de la sortie d'un labyrinthe
Pour démarrer, exécutez le fichier demo-GA-labyrExit.jar (double-cliquez dessus, ou bien faire java -jar demo-GA-labyrExit.jar dans un "terminal").
Dans ce problème, un "robot" se déplace dans un labyrinthe,
et s'arrête dès qu'il se cogne contre un mur, revient sur
un emplacement qu'il a déjà visité, ou a atteint la
sortie. Le but est de trouver un parcours menant à la sortie
(marquée par une croix verte). On va donc utiliser une population
dans laquelle chaque individu correspond à un ensemble de décisions
de direction à prendre (et sera représenté uniquement
par sa trajectoire dans le labyrinthe).
-
De nombreux types de codages très différents sont envisageables,
depuis une succession d'ordres "Droite-Droite-Bas-Gauche-..." jusqu'à
la représentation d'une fonction de décision dépendant
de ce que le robot "voit" dans son environnement immédiat et de
l'historique complet de ses actions et perceptions antérieures.
On a ici choisi de ne pas tenter de faire des robots "intelligents", mais
de se limiter à des robots en quelque sorte "pré-programmés",
avec un codage indiquant au robot quelle direction il doit prendre en fonction
de son seul emplacement : comme il y a pour chaque case 4 orientations possibles
dans l'absolu (indépendamment des murs) et N cases constituant le
labyrinthe, on a adopté comme génome pour chaque individu
une séquence de 2*N bits (2 bits par case).
- Comme dans l'exemple précédent, la taille de la population
et la probabilité de mutation ont une influence sur l'efficacité
de l'algorithme génétique, mais l'intérêt
essentiel de ce deuxième exemple est de mettre en évidence
l'importance et la difficulté du choix de la fonction d'évaluation
des individus :
-
une approche simpliste ("ExitFound") consiste à donner
une "note" ne dépendant que du fait que le robot ait atteint ou
non la sortie ; l'ennui est qu'alors tous les robots ne trouvant PAS la
sortie ont la même note, ce qui fait que l'algorithme génétique
se résume alors à une recherche totalement au hasard : pour
qu'un algorithme génétique soit efficace, il FAUT une fonction
d'évaluation qui augmente "progressivement" à mesure qu'on
s'approche de la bonne solution.
-
une fonction d'évaluation qui respecte le critère précédent
est par exemple celle consistant à mesurer de quelle distance le
robot s'est rapproché de la sortie par rapport à sa position
de départ ("MaximizeExitProximity") ; le problème
est que l'évolution peut alors avoir tendance à se bloquer
sur des étapes intermédiaires de parcours où il est
nécessaire de s'éloigner (temporairement) de la sortie.
-
une troisième approche ("MaximizeCellsVisited") peut consister
à compter le nombre d'emplacements visités, pour favoriser
les robots explorant le labyrinthe par rapport à ceux qui "foncent
dans le premier mur qu'ils rencontrent" et à ceux qui se bloquent
dans un virage éloignant de la sortie ; mais ceci peut évidemment
conduire à trouver des individus qui font une grande boucle dans
le labyrinthe au lieu de trouver la sortie.
-
en fin de compte, la fonction d'évaluation la plus efficace pour
résoudre ce problème est probablement une sorte de combinaison
des trois précédentes (et peut-être d'autres !), telle
que "MixedStrategy", qui vous permet de tester les combinaisons
linéaires des trois précédentes.
Testez les fonctions d'évaluation présentées
ci-dessus et comparez leurs efficacités respectives à faire
émerger un individu trouvant la sortie du labyrinthe.
On pourra constater que si
tout se passe bien, l'algorithme génétique est capable de
trouver un chemin jusqu'à la sortie en environ 150
générations (voire moins) de taille égale à
environ 200 individus (voire moins), ce qui implique qu'on
a réellement testé au maximum 150x200~30000
hypothèses avant de trouver une solution convenable, alors que
le cardinal total de l'espace exploré est 298~1031
(il y a 2 bits pour chacune des 49 cases, donc 98 bits) : ceci illustre
la très grande capacité des algorithmes
génétiques à "trouver une aiguille dans une botte
de foin"...
Remarque : cette
démonstration reste toutefois à but essentiellement illustratif
et pédagogique, puisqu'il existe des algorithmes "classiques"
capables de trouver la sortie de tout labyrinthe, et ce probablement de
façon plus efficace que les algorithmes génétiques
dans la présente démo...
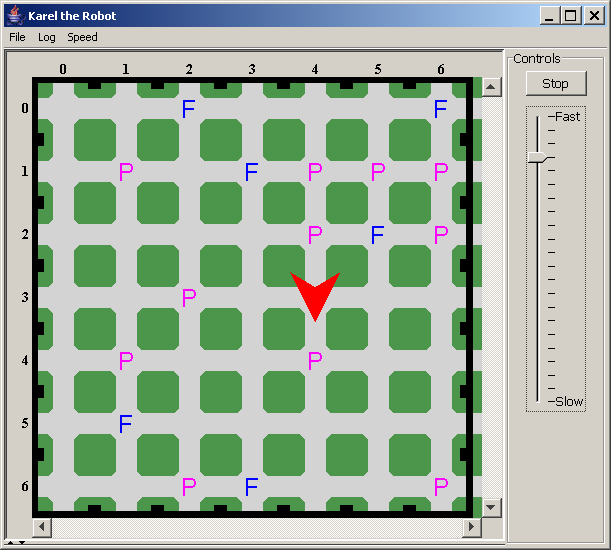
Exercice 3 : apprentissage d'un comportement de robot
Pour
commencer, visualisez l'environnement dans lequel évolue le
"robot", et voyez le comportement inefficace du robot quand son
"cerveau" neuronal est inadapté :
dans un "terminal", faire java -jar demo-GA-testAnimat.jar ratherStupidBrain.dat, puis appuyez sur le bouton start.
Le
but serait que le robot explore l'espace pour y trouver et "manger" la
"nourriture" (les F, comme Food, disséminés
aléatoirement sur la grille), tout en ne consommant pas le
"poison" (les P disposés eux-aussi aléatoirement) s'il
vient à passer dessus.
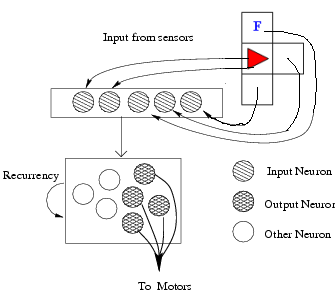
Le comportement du robot est déterminé par un petit
réseau neuronal totalement bouclé(donc
ayant un "état"
interne) dont les sorties décident de son action (tourner,
avancer, manger) en fonction de ce qu'il perçoit
(présence
de mur,de nourriture ou de "poison" juste en face, en face à
gauche ou en face à droite). Ce réseau, illustré
ci-dessus à droite, possède 5
entrées correspondant à 5 "senseurs" locaux
(présence ou non de "quelque chose" là où il
se trouve et sur les 3 cases adjacentes face/gauche/droite, "odeur" ou non de nourriture)
et 10 neurones totalement
connectés entre eux, dont 4 servent de sorties
déterminant le comportement du robot : une sortie
détermine s'il faut avancer, une autre s'il faut pivoter
à droite, une troisième s'il faut pivoter à
gauche, et la dernière sortie décide si le robot tente de
"manger" ce qui serait éventuellement présent là
où il se trouve.
Le réseau contient donc 160 poids de connexions et biais pour
lesquels il s'agit de trouver une combinaison de valeurs telle que le
comportement résultant du robot soit le plus proche possible de
celui recherché (ie trouver et manger tous les F, mais ne manger
aucun P).
Il s'agit donc d'un problème d'apprentissage non-supervisé,
au sens où on n'indiquera pas au réseau quelle
décision prendre (donc quelles sorties produire) en fonction de
ses entrées, et où ce qu'on cherche à optimiser
n'est donc pas une simple erreur entre sorties désirées
et sorties obtenues, mais un critère autre, en l'occurence la
proportion de F "mangés" (diminuée du nombre de P
consommés). On va effectuer cet apprentissage
non-supervisé en utilisant des algorithmes
génétiques, avec comme fonction d'évaluation
("fitness") la mesure (nbFood-nbPoison)/maxFood, où nbFood et
nbPoison sont les quantités respectives de F et P
"mangés" et maxFood la quantité totale de F disponibles ;
pour que le comportement appris soit "général", cette
mesure de fitness est moyennée sur N (=5) simulations du
même robot dans des environnements aléatoires
différents (seules les positions des F et des P variant), avec
à chaque fois une position initiale et orientation initiale
aléatoires pour le robot. Le codage employé pour le
génome est ici directement la représentation binaire
des 160 valeurs des poids et biais (autrement dit, une mutation
appliquée correspond à inverser 1 bit de l'encodage
IEEE-754 d'un de ces double).
Pour démarrer l'apprentissage par algorithmes génétiques, exécutez le fichier demo-GA-animat.jar (double-cliquez dessus, ou bien faire java -jar demo-GA-animat.jar dans un "terminal").
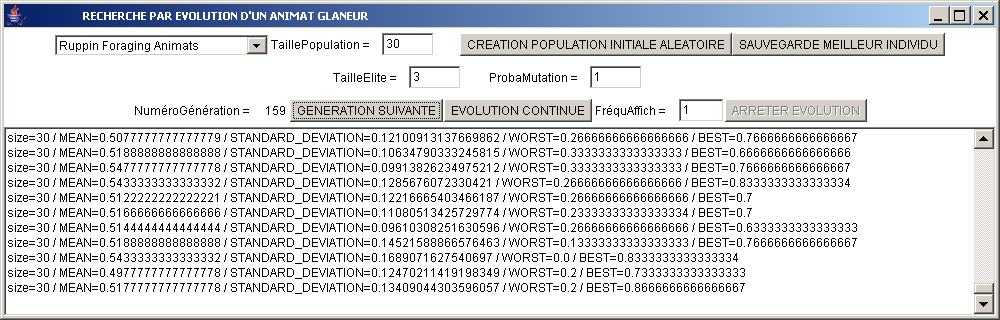
- Créez une population initiale.
- Faire évoluer la population :
à chaque génération (ou bien toutes les G
générations, si une valeur G est mise dans frequAffich)
sont affichées diverses évaluation de la population :
moyenne, ecart-type, minimum et enfin et surtou maximum de
la fitness. A
votre avis, pourquoi l'évaluation du meilleur individu
(dernière valeur de chaque ligne) n'est-elle pas strictement
croissante, même quand tailleElite>0 ?
- Poursuivre l'évolution jusqu'à obtenir une
génération dont le meilleur individu ait un score >
0.8 (voire même, idéalement, >0.9)
- Arrêtez alors l'évolution, et sauvegardez le meilleur individu.
- Testez le comportement de cet indivividu en lançant, dans un terminal la commande suivante :
java -jar demo-GA-testAnimat.jar evolved-xxgen-blaBla.dat
où evolved-xxgen-blaBla.dat doit être remplacé par le nom exact du fichier
qui a été créé par la sauvegarde du
meilleur individu.
- Compte
tenu des exercices précédents de ce TP, et aussi de ce
qui a été évoqué (durant les séances
consacrées au réseaux neuronaux) sur l'influence des
valeurs absolues des poids d'un réseau sur sa
"complexité", quelles modifications pourrait-on
envisager dans la façon d'utiliser les Algorithmes
Génétiques sur ce problème, en vue d'obtenir des
résultats encore plus satisfaisants ?